Portalkranroboter
Wer den Kran in bewegten Bildern sehen möchte, kann hier ein Video downloaden.
Hier seht ihr meinen Portalkranroboter. Der Roboter wird über das Intelligent Interface, welches mit der Software LLWin 3.0 programmiert wurde, gesteuert. Da ich (noch) kein Extension Modul für das Interface habe, sind einige Eingänge zweifach oder sogar dreifach belegt. Meistens die Stromanschlüsse.
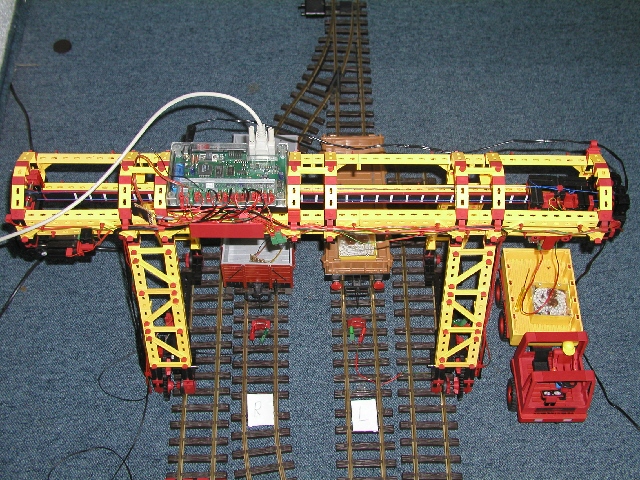 Auf den beiden Schienen in der Mitte ist jeweils ein Reedkontakt zu sehen. Über diesen Kontakt erkennt der Kran auf welcher Schiene sich der Wagon befindet. Unter allen
Wagons ist ein Magnet befestigt. Bleibt der Wagon länger als 0,25 sec. auf dem Reedkontakt stehen, sucht sich der Kran mit Hilfe einer
Lichtschranke den Anfang des Wagons. Danach fährt die Katze (das Teil wo der Magnet dran hängt) über den Wagon, greift einen Container ,laut FischerTechnik (FT) ein
Kassetten-Unterteil, und lädt diesen auf den LKW, der rechts neben dem Kran steht. Das selbe geschieht auch mit dem zweiten und dritten Container.
Auf den beiden Schienen in der Mitte ist jeweils ein Reedkontakt zu sehen. Über diesen Kontakt erkennt der Kran auf welcher Schiene sich der Wagon befindet. Unter allen
Wagons ist ein Magnet befestigt. Bleibt der Wagon länger als 0,25 sec. auf dem Reedkontakt stehen, sucht sich der Kran mit Hilfe einer
Lichtschranke den Anfang des Wagons. Danach fährt die Katze (das Teil wo der Magnet dran hängt) über den Wagon, greift einen Container ,laut FischerTechnik (FT) ein
Kassetten-Unterteil, und lädt diesen auf den LKW, der rechts neben dem Kran steht. Das selbe geschieht auch mit dem zweiten und dritten Container.
Zur Technik:
Der Kran wird insgesamt mit vier Motoren gesteuert und an dem Haken befindet sich ein E-Magnet. Weil das Interface nur vier Ausgänge hat, sind die zwei Motoren, die
den Kran vor und zurück bewegen an einem Ausgang angeschlossen. Die Positionierung erfolgt fast überall durch die Impulsrädchen von FT. Nur bei der Katze erfolgt sie
mit einem Optokopler. Dem CNY70.
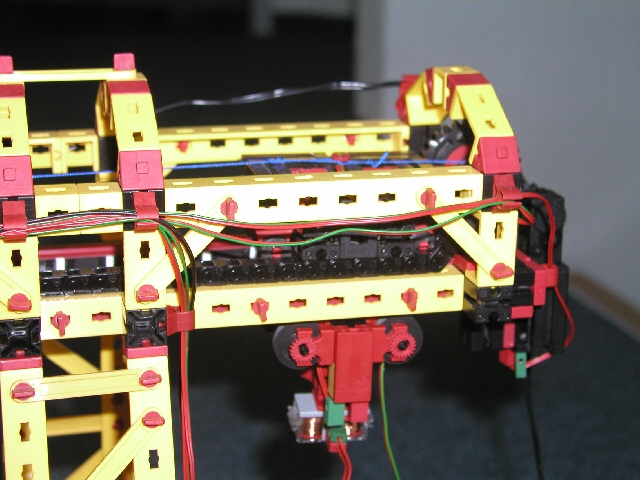 Die Katze läuft auf einer Schiene, die von innen mit weißen Strichen versehen ist. Diese sind in regelmäßigen Abständen und werden so vom CNY70 gezählt.
Sie sind auf dem linken Foto zu sehen. Das hat den Vorteil, dass
die Katze nicht wieder in die Home-Position zurück fahren muss, wenn sie mal irgendwo hängen geblieben ist. Bei einem Impulsrad würde weitergezählt werden und irgendwo
be- oder entladen werden. Um unnötiges Kabelgewirr zur Katze zu vermeiden habe ich mir eine Energiekette bei Knobloch
bestellt (siehe linkes Foto). Diese ist zwar nur für insgesamt 8 Adern ausgelegt, aber meine führt 9 :-). Wie oben beschrieben sucht sich der Kran den Anfang des Wagons über eine Lichtschranke.
Diese befindet sich zwischen den beiden Beinen. Da die FT Fototransistoren
mit der FT Liensenlampe nicht auf eine so große Entfernung schalten, musste ich etwas improvisieren. Ich habe eine weiße ultrahelle LED und einen Fotowiderstand genommen. Der Fotowiderstand
ist jetzt an einen analogen Eingang des Interfaces angeschlossen.
Die Katze läuft auf einer Schiene, die von innen mit weißen Strichen versehen ist. Diese sind in regelmäßigen Abständen und werden so vom CNY70 gezählt.
Sie sind auf dem linken Foto zu sehen. Das hat den Vorteil, dass
die Katze nicht wieder in die Home-Position zurück fahren muss, wenn sie mal irgendwo hängen geblieben ist. Bei einem Impulsrad würde weitergezählt werden und irgendwo
be- oder entladen werden. Um unnötiges Kabelgewirr zur Katze zu vermeiden habe ich mir eine Energiekette bei Knobloch
bestellt (siehe linkes Foto). Diese ist zwar nur für insgesamt 8 Adern ausgelegt, aber meine führt 9 :-). Wie oben beschrieben sucht sich der Kran den Anfang des Wagons über eine Lichtschranke.
Diese befindet sich zwischen den beiden Beinen. Da die FT Fototransistoren
mit der FT Liensenlampe nicht auf eine so große Entfernung schalten, musste ich etwas improvisieren. Ich habe eine weiße ultrahelle LED und einen Fotowiderstand genommen. Der Fotowiderstand
ist jetzt an einen analogen Eingang des Interfaces angeschlossen.
Hier gibt es noch ein paar mehr Fotos von meinem Kran. Wenn ihr das Bild größer sehen wollt oder wissen wollt was da so tolles zu sehen ist, einfach auf das Bild klicken. Dann kommt ein neues Fenster, in dem ihr dann alles seht. Falls euch ein kleiner Unterschied am Kran auffällt: Ich habe zwischendurch die Position der Motoren geändert, weil der Kran langsamer laufen sollte.